Данная статья интересна именно с точки зрения программирования. Есть интересуют вопросы по сборке, следует обратиться к предыдущей статье.
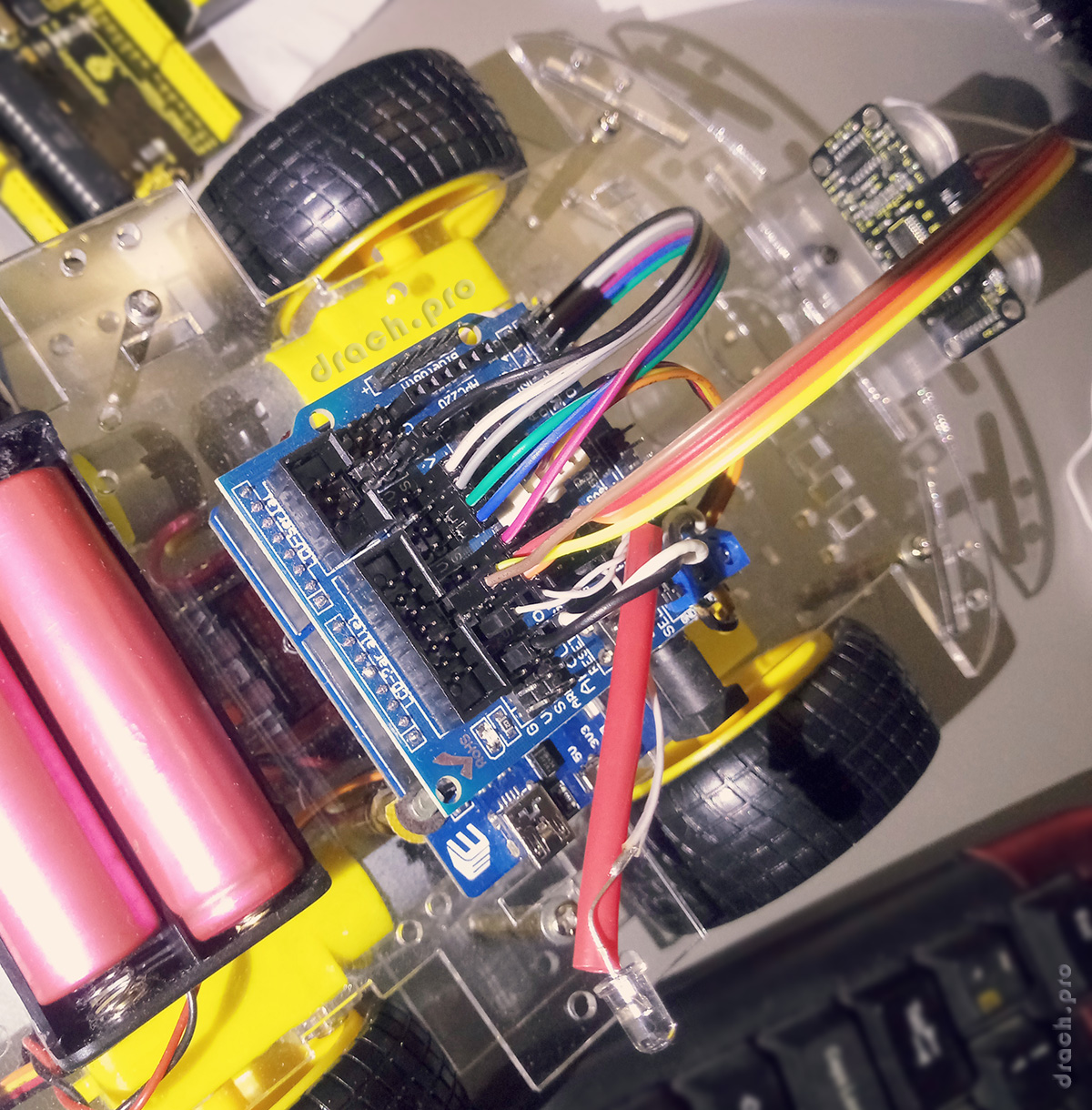
Обращаю внимание, что изменилась разводка соединительных кабелей по сравнению с исходной статьёй (например, освобождены аппаратные RX/TX). Мне не хочется рисовать схему соединений, надеюсь, что и так всё понятно из шапки программы. На всякий случай прикладываю фотографию, на которой хорошо виден Sensor Shield и подходящие к нему провода.
Алгоритм работы в общих чертах остался прежним: машина едет вперёд до тех пор, пока не "увидит" преграду, затем откатывается назад и поворачивается вокруг своей оси, а потом продолжает движение.

Однако, теперь добавлены нововведения, которые делают поведение машины забавным и витиеватым.
1) Добавлен режим "Паника", в который робот переходит, если несколько раз подряд наталкивается на препятствия. Паника заключается в долгом вращении вокруг своей оси и включении сирены, мигает двухцветный диод и машина издаёт тревожные звуки виу-виу. Для описания условий перехода в данный режим пришлось ввести уникальную систему штрафов, которые назначаются за встречу с препятствием.
2) Добавлен выбор лучшего направления движения после отката от препятствия (поворот на дискретный угол и проверка расстояния - продолжается до тех пор, пока не будет выбрано удачное направление). Это нововведение позволило избавиться от бестолкового поведения, когда робот откатывался от препятствия, но поворачивался неудачно, поэтому снова тыкался в него же.

На картинке видно, что робот загнан в угол, пытается выбрать лучшее направление направление движения. Но он перебирает их случайным образом, не запоминая неудачный выбор, поэтому через некоторое время у него не получается выбраться, начинается бесконечное метание в углу. Примерно через 3-4 отскока от препятствия подряд робот переходит в режим паники. Включается вся иллюминация и начинается дикое вращение.
Заключительная стадия режима "Паника" (на GIF не показана) - это методичный последовательный перебор всех возможных вариантов движения, в итоге выбирается направление движения, в котором расстояние до преграды максимально. Это позволяет реально выпутываться из самых сложных конфигураций стен, включая шторы и ножки нескольких табуреток.
Текст программы приведён ниже. Прошил - и готово!
// 4WD RoboCar
// Sonar (NO Servo) + HeadLight + Syrens + LED13 (as backlight) + photosensor
// 2017-December-31
// v.0.5с (хорошая версия)
// Global variables:
byte Critical = 13; // Критическое расстояние до препятствия в [см]
byte randomNumber; // Случайное число
byte Cost = 60; // Штраф (назначается за неспособность ехать вперёд)
byte Profit = 180; // "Прибыль", которая плавно растёт при движении вперёд
byte velocity = 220; // Скорость моторов [1..255]
// Setup the servo motor
// #include
// Servo myservo;
// int servposnum = 0;
// int servpos = 0;
// Описываем подключение драйвера двигателей
// A - правый борт
// В - левый борт
int enableB = 3; //~ Остался!
int pinB2 = 4; //
int pinB1 = 5; //
int enableA = 6; //~ Остался!
int pinA1 = 7; //~
int pinA2 = 8; //
#define illumination A0 // подключаем составной светодиод
// Подключаем ультразвуковой датчик
#define trigPin 9
#define echoPin 10
#define light 11 // На этот вывод подключены фары
int Buzzer = 12;// Подключаем зуммер
// Фоторезистор подключен к АЦП
#define PHOTO_SENSOR A5
#define Sweep 8000 // скорость нарастания и убывания частоты
#define Woo_wait_sec 2 // сколько с. длится гудение на макс. частоте
void setup() {
// Определяем направление работы линий
pinMode (enableA, OUTPUT);
pinMode (pinA1, OUTPUT);
pinMode (pinA2, OUTPUT);
pinMode (enableB, OUTPUT);
pinMode (pinB1, OUTPUT);
pinMode (pinB2, OUTPUT);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
pinMode(13 , OUTPUT);
pinMode(light , OUTPUT);
pinMode(illumination , OUTPUT);
enableMotors();
SayBeep();
delay(2000);
digitalWrite(13, LOW); // Выключаем встроенный диод
// Serial.begin(9600); // Отправляем данные на ПЭВМ
}
// Описываем варианты работы моторов
void motorAforward() {
digitalWrite (pinA1, HIGH);
digitalWrite (pinA2, LOW);
}
void motorBforward() {
digitalWrite (pinB1, LOW);
digitalWrite (pinB2, HIGH);
}
void motorAbackward() {
digitalWrite (pinA1, LOW);
digitalWrite (pinA2, HIGH);
}
void motorBbackward() {
digitalWrite (pinB1, HIGH);
digitalWrite (pinB2, LOW);
}
void motorAstop() {
digitalWrite (pinA1, HIGH);
digitalWrite (pinA2, HIGH);
}
void motorBstop() {
digitalWrite (pinB1, HIGH);
digitalWrite (pinB2, HIGH);
}
void motorAon() {
digitalWrite (enableA, HIGH);
}
void motorBon() {
digitalWrite (enableB, HIGH);
}
void motorAoff() {
digitalWrite (enableA, LOW);
}
void motorBoff() {
digitalWrite (enableB, LOW);
}
// Описываем варианты движения машины
void goForward (int duration) {
motorAforward();
motorBforward();
delay (duration);
}
void goBackward (int duration) {
motorAbackward();
motorBbackward();
delay (duration);
}
void rotateRight (int duration) {
motorAbackward();
motorBforward();
delay (duration);
}
void rotateLeft (int duration) {
motorAforward();
motorBbackward();
delay (duration);
}
void FullStop (int duration) {
motorAstop();
motorBstop();
delay (duration);
}
void disableMotors() {
motorAoff();
motorBoff();
}
void enableMotors() {
motorAon();
motorBon();
}
void CheckLight () {
int val = analogRead(PHOTO_SENSOR);
/* if (val > 999) {
digitalWrite(13, HIGH); // слишком светло
panic(); // это повод
digitalWrite(13, LOW); // паниковать
} */
if (val < 500) {
// Темновато, включаем фары
digitalWrite(light, HIGH);
} else {
// Светло, выключаем фары
digitalWrite(light, LOW);
}
}
// Пользуемся УЗ датчиком расстояния
int distance() {
int duration, distance;
digitalWrite(trigPin, HIGH);
delayMicroseconds(1000);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
distance = (duration/2) / 29.1; // Переводим в сантиметры
return distance;
}
// Функция запуска автомобиля
void launch() {
int distance_0;
distance_0 = distance();
// Serial.print(distance_0);
// Serial.println(" сантиметров. ");
// Движемся вперёд, пока расстояние до преграды > критического [cm]
while (distance_0 > Critical)
{
CheckLight (); // проверяем, не пора ли зажигать фары?
analogWrite (enableA, velocity);
analogWrite (enableB, velocity);
goForward(30); // Едем вперёд некоторое время
randomNumber = random(1,100); // передёрнули затвор генератора ПСЧ
if (Profit < 254 ) { Profit++; };
// Serial.print(Profit);
distance_0 = distance();
}
FullStop(100); // Останов, т.к. впереди помеха
}
void Woo(int freq, long duration){ // первый параметр частота, чем ниже он тем выше частота, второй длительность
long time = duration/2/freq;
for(long t = 0; t < time; t++)
{ digitalWrite(Buzzer, HIGH);
delayMicroseconds(freq);
digitalWrite(Buzzer, LOW);
delayMicroseconds(freq); }
}
void Syren() {
for(int i = 0; i <= 1; i++){ // делаем виу-виу 2 раза
for(int f = 2000; f >= 100; f=f-40){ // нарастание частоты
Woo(f, Sweep); }
// Woo(400, Woo_wait_sec*100); // сколько длится гудение на максимальной частоте
for(int f = 100; f <= 2000; f=f+40){ // убывание частоты
Woo(f, Sweep); }
}
}
void panic() {
int distance_tmp;
int distance_new = 32000;
int angle = 600; // угол поворота, измеряем в [мс]
FullStop(100); // Сначала останавливаемся
Profit = 255; // Забываем про старые штрафы!
// Serial.print(Profit);
digitalWrite(illumination, HIGH); // включаем мигалку
Syren ();
Syren ();
Syren ();
delay(1000); // пауза, для отдыха
// Выполняем манёвры на высокой скорости (ведь паника!)
analogWrite (enableA, velocity);
analogWrite (enableB, velocity);
// 0) Начинаем крутиться волчком в какую-то сторону:
randomNumber = random(1,100);
if (randomNumber < 50) { motorAbackward(); motorBforward(); }
else { motorBbackward(); motorAforward(); };
// Истерично продолжаем крутиться, пока гудит сирена:
Syren ();
delay (1000); // Ждём
FullStop(1000);
delay (100); // Ждём
// 1) Ищем хоть какое-то направление, куда вообще можно ехать
distance_tmp = distance();
do {
rotateRight(angle); // Крутимся
FullStop(1000); // Ждём и смотрим вдаль
distance_tmp = distance();
} while(distance_tmp < Critical); // повторяем поворот, если расстояние всё ещё мало
SayBeep();
// rotateLeft(angle); // Возвращаемся на один шаг
// 2) Пытаемся выбрать лучшее направление!
/* rotateRight(angle); // Крутимся и проверяем дистанцию
distance_new = distance();
if (distance_new < distance_tmp) // Не угадали, раньше было лучше,
{rotateLeft(angle); } // поэтому поворачиваемся обратно */
/* distance_new = 32000;
while( distance_new > distance_tmp ) {
distance_tmp = distance();
rotateRight(angle); // Крутимся и проверяем дистанцию
FullStop(900); // Ждём и смотрим вдаль
distance_new = distance();
delay (800); // Ждём и смотрим вдаль
} */
do {
distance_tmp = distance();
rotateRight(angle); // Крутимся и проверяем дистанцию
FullStop(900); // Ждём и смотрим вдаль
distance_new = distance();
delay (800); // Ждём и смотрим вдаль
} while( distance_new > distance_tmp );
// Не угадали, раньше было лучше,
rotateLeft(angle); // поэтому поворачиваемся обратно
FullStop(1000); // Восстанавливаем дыхание, успокаиваемся
digitalWrite(illumination, LOW); // успокоились, выключаем мигалку
delay (410); // Ждём
SayBeep();
}
void rollBack()
{
digitalWrite(13, HIGH); // Включаем встроенный диод!
// Сначала откатываемся назад на случайное количество шагов
randomNumber = random(700,2100);
//analogWrite (enableA, 150);
//analogWrite (enableB, 189);
goBackward(randomNumber);
FullStop(200); // Восстанавливаем дыхание, успокаиваемся
// Случайным образом выбираем направление поворота:
randomNumber = random(1,100);
do { // поворачиваемся в выбранную сторону на случайный угол
if (randomNumber < 50) { rotateRight(random(450,1300)); } else { rotateLeft(random(350,1400)); };
FullStop(1000); // Выключаем моторы
tone(Buzzer, 600, 333);
delay (700); // передышка!
} while( distance() < Critical ); // повторяем поворот, если расстояние всё ещё мало
analogWrite (enableA, velocity);
analogWrite (enableB, velocity);
FullStop(600); // Восстанавливаем дыхание, успокаиваемся
digitalWrite(13, LOW); // Выключаем встроенный диод
// SayBeep();
delay (200); // передышка!
}
void avoid()
{
CheckLight (); // проверяем, не пора ли зажигать фары?
tone(Buzzer, 2100, 110);
delay (700); // передышка!
// Штрафуем сами себя:
if (Profit > Cost) {
Profit = Profit - Cost; // Ещё есть возможность оплатить штраф,
rollBack(); // тогда откат назад с разворотом
// Serial.print(Profit);
} else {
// Нельзя штрафовать, всё плохо, значит запутались - паникуем
panic();
}
}
void SayBeep(){
tone(Buzzer, 700, 109);
delay(200);
tone(Buzzer, 1200, 109);
delay(200);
tone(Buzzer, 2600, 240);
delay(350);
noTone(Buzzer);
}
void loop() {
randomNumber = random(2,5); // вхолостую выбираем псевдо-случайное число
launch(); // запускаем автомобиль вперёд до встречи с преградой
avoid(); // откатываемся от препятствия и как-то поворачиваемся
CheckLight (); // проверяем, не пора ли зажигать фары?
}
Как видно, программа стала значительно длиннее. Надеюсь, она не потеряла изящности.
В режиме отладки можно отправлять данные в монитор последовательного порта, чтобы оценить динамику набора очков и получения штрафов.
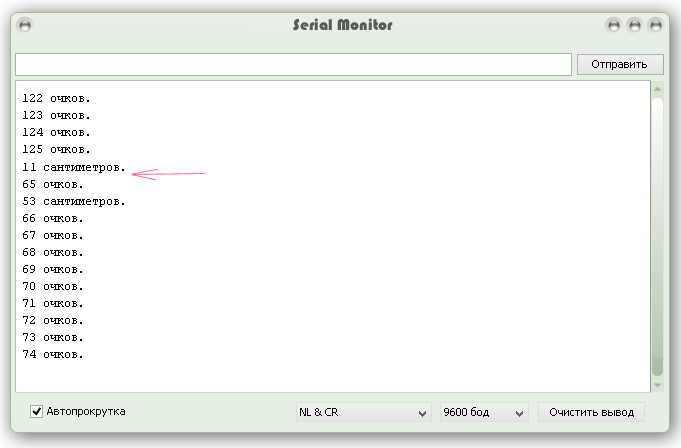
Фактически, наш аппарат перемещается вперёд дискретно, шагами. Одно очко выдаётся за один шаг вперёд. Если впереди препятствие, назначается штраф. Встреча с препятствием показана красной стрелкой на рисунке выше. Затем автомобиль находит направление для дальнейшего движения, теперь очки линейно начисляются за непрерывное движение вперёд.
Для различных помещений и задач можно варьировать как константу штрафа (Cost), так и время выполнения одного "шага". Это позволит переходить реже или чаще в режим паники.


Отзывы
Написал Иван
Опубликовано в: Генератор изображений FooocusНаписал Денис
Опубликовано в: Настройка модуля HC-06Написал deman696
Опубликовано в: Настройка модуля HC-06Написал Борис
Опубликовано в: Сравнение современных СУБДНаписал Den
Опубликовано в: Редактирование сейвов Mass Effect 1